徐邦国,张博宇,吴华贵,杜新宇,刘 露
(天津职业技术师范大学机械工程学院,天津 300350)
人工智能技术已经成为当代研究的重点内容,是代替传统行业和极限领域行业的重要手段。楼体清洁工是极限环境下,应用爬壁机器人的重要领域。而机器人自身的核心技术也需要不断优化与改进,爬壁机器人自身需要具备良好的移动功能与吸附功能。因此,机器人可以分为负压吸附、磁吸附、正吸附和干粘吸附四类。
1.1 新型爬壁机器人开发技术指标
对于新型爬壁机器人的研究,机器安全性方面需要有所保障。在设计方面需要逐步提高机器人跨越障碍的能力,自身体积也需要朝着轻量化方向发展,使之具备更高的使用价值[1]。对此,本研究探究爬壁机器人开发技术指标,设计机器人工作速度在5~20 m/min,跨越障碍的能力为45 mm,机器人自身重量20 kg,负载强度15 kg,作业范围0~100 m。
1.2 新型爬壁机器人总体方案设计
1.2.1 移动方式分析
在移动方式方面,静态步行状态下需要强化机器人与墙面之间接触点。因而,需要至少保证机器人四条腿能够吸附在墙面之上[2]。在部分时间内,能够有八条腿与墙面保持吸附状态,稳定重心。在动态步行状态下,移动与吸附两种状态是同时进行的,因而需要强化重心控制,通过内外框架相邻的两条腿的连线构成平行四边形区域。而在准动态步行的状态下,为确保机器人的形体结构稳定,需要机器人以八条腿支撑,形成结构对称性框架[3]。
1.2.2 吸附方式的分析
本研究所设计的新型爬壁机器人选择负压式吸附方式,负压式吸附通常是利用真空泵或真空发生器,使机器人的吸盘内腔形成真空地带,利用大气压强使机器人能够贴附于墙面之上。本研究设计的爬壁机器人,利用负压吸附方式组成的多吸盘,比单个吸盘具有更高的优势性能,吸附稳定性高,且抗倾覆能力对于提高机器人自身的吸附能力与跨越障碍的能力有很大帮助。通过调整摩擦力与吸附力吸盘之间的组合配置,从而提高机器人对不同材质的壁面适应能力。
2.1 新型吸附吸盘的改进设计
在新型爬壁机器人的吸盘设计时,选用Festo 公司出产的75 mm 波纹吸盘,其材质为丁青橡胶吸盘重量为76 g。在吸盘内部涂抹封闭材料,弥补了丁青橡胶吸盘的不足之处,实现较好的密封效果。以拉力实验为基础测试,新型的吸盘在墙面的吸附效果,能够在较为粗糙的壁面上承受10 kg 以上的拉力[4]。
2.2 新型腿部设计与结构分析
气动肌肉分析:将气动肌肉用于模拟爬壁机器人的腿部结构具有较大优势,能够减轻机器人的整体重量。通过气动肌肉与平行四边形的组合,实现爬壁机器人的抬腿与跨越障碍能力的提高。本研究所选用的气动机电产品为DMSP 这一产品,内径在10 mm。如若拉力在100 N 的条件下,气源压力5 bar 时,收缩比能够达到12%,气源压力为6 bar 时,收缩比能够达到15%,气源压力为8 bar 时,收缩比能够达到19%。
2.3 新型爬壁机器人动力学分析
2.3.1 新型机器人十字动平台动力学分析
从动力学角度进行爬壁机器人的研究,对机器人动态运动位置结构设计、驱动执行与传动机制的分布进行探究。利用十字动平台移动机构,能够实现爬壁机器人内部框架与外部框架纵向、横向与斜向的运动,从而让机器人能够在爬壁过程中灵活运转,控制驱动。采取单独电机与同步齿轮带的方式,能够让机器人独立运动,相互之间不会产生负面影响。以坐标轴的方式阐释机器人的坐标位置运转,当机器人横向运转时,驱动带轮1 会运动,而驱动带轮2 静止,此时坐标输出为△x1=γ·△θ1。
2.3.2 新型机器人内外框架的动力学分析
以十字形框架基础,当内框架吸附于壁面时,外框架进行相对运动,实现机器人的爬壁。当机器人处于xoy 坐标系当中时,横向运动驱动轮1 开始行动。此时,输入角位移为θ1,当纵向电机开启时,驱动轮2 开始移动,此时输入角位移为θ2。因而,当机器人的内框架吸附于壁面,而外框架在进行相对运动时,可以将位移表示为x=γ·θ1,y=γ·θ2,而此时,动能公式为外框架质量·(x2+y2),或十字动平台质量·γ2·()。
3.1 新型机器人虚拟模型仿真
3.1.1 ADAMS 模型的建立
新型爬壁机器人在模型建立的过程当中,需要利用三维软件搭建简化版的三维模型[5]。利用中间格式导入到ADAMS 当中,进行爬壁机器人腿部系统的搭建,并根据机器人的实际受力情况,在模型当中进行模拟。将机器人腿部与壁面之间的约束力进行固定,脚链旋转副将小腿与大腿相连接,并将移动平面副、盘底座,以同样方式连接在小腿上,安装圆柱副与安装座。劲度系数通常为2 N/mm。
3.1.2 腿部动力学仿真
本研究针对新型爬壁机器人腿部仿真进行训练,主要是进行腿部的抬腿动作与放下动作。利用平行四边形这种对称结构,使机器人抬脚动作与放下动作。都能够同时处于同一平面,保障机器人的稳定性能。并且在吸附方式上,采取的是吸附盘三角形的布置方式,具有稳固性能。在仿真训练进行时,以气源压力5 bar 为例,构建模拟仿真情景,腿部抬腿的位移距离在218~262 mm 之间。在仿真模拟实验的过程当中,能够看出机器人在腿部运动的过程中,所受到的冲击力较小,机器人行走的较为平稳。
3.2 新型机器人减重改进分析
为使新型爬壁机器人自身重量能够有所降低,因此需要对机器人的自身重量进行控制,使其不会受太大的重力影响,这就需要在材料选择方面进行优化。机器人的主要部件可以选择铝合金2Al2。该材料的性能需要参考表1。
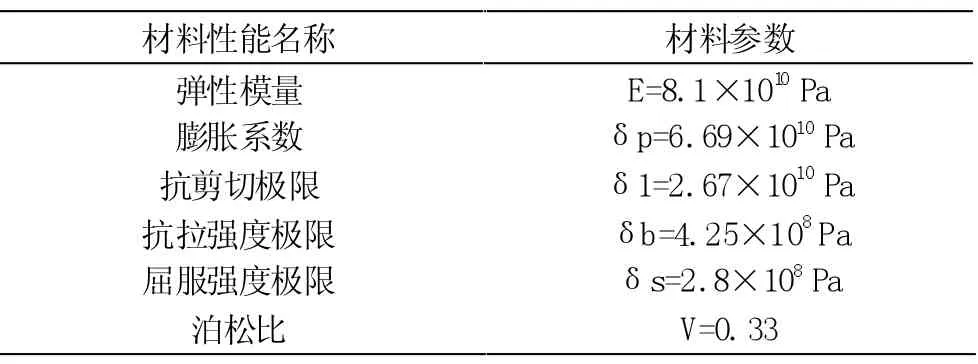
表1 材料性能参数表
在对爬壁机器人进行减重分析时,利用减重拓扑对其进行分析。采取选中30%的情况进行分析,将能够更改替换的部分挖孔,进行实际情况加载受力分析,能够达到材料自身所承担的各种力的极限。由此证明,通过合理减重30%是能够达到材料承受应力的预期数值。
4.1 新型爬壁机器人气动系统设计
4.1.1 吸附系统设计
机器人吸附于壁面之上,是利用真空泵或者是真空发生器,使之产生真空区域,通过外部压强使机器人能够贴附在壁面之上。
通过对真空发生器和真空泵的数据对比(见表2),本文选取真空发生器进行实验,气压在0.4~0.5 Mpa。该机器人吸盘组是由多个吸盘组合排列而成的,以正三角形为基础的构造,切实保障机器人的吸附能力。同时,对每个吸盘组安装真空压力开关,保障吸盘能够独立工作,并检测吸盘是否处于工作状态。
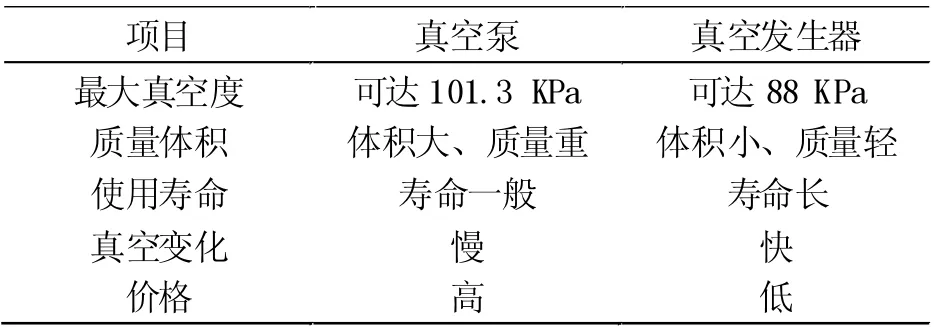
表2 真空发生器和真空泵数据对比表
4.1.2 新型爬壁机器人气动系统集成
本研究在进行新型机器人设计时,为了进一步减轻机器人的自身重量,将空压机和气源组件放置在楼顶上利用,楼顶的SUV随动小车确保记录的通畅。利用气动肌肉进行气动系统运转,通过安全控制阀和控制传感器对各吸附系统进行控制,利用电磁阀对气动肌肉进行单独管理。
4.1.3 新型爬壁机器人系统模块流程图
本研究所设计的新型爬壁机器人,利用DSP 嵌入式系统,完成机器人的总控装置。控制系统包含CPU、通信模块、存储系统、人机模块、传感检测模块与外围器件驱动模块等。
爬壁机器人在系统初始化时需要对机器人的位置进行反馈,根据系统所反馈回的横向、纵向、斜向等传感器信息进行方向决策。观察是否有障碍物,如果有障碍,则通过调整行进距离或腿部抬升跨越障碍的方式进行处理。如果没有障碍物,则依照常规速度前进。通过系统流程图,能够更加清楚了解机器人工作过程当中,系统指令的运转情况。图1 为系统工作流程图。
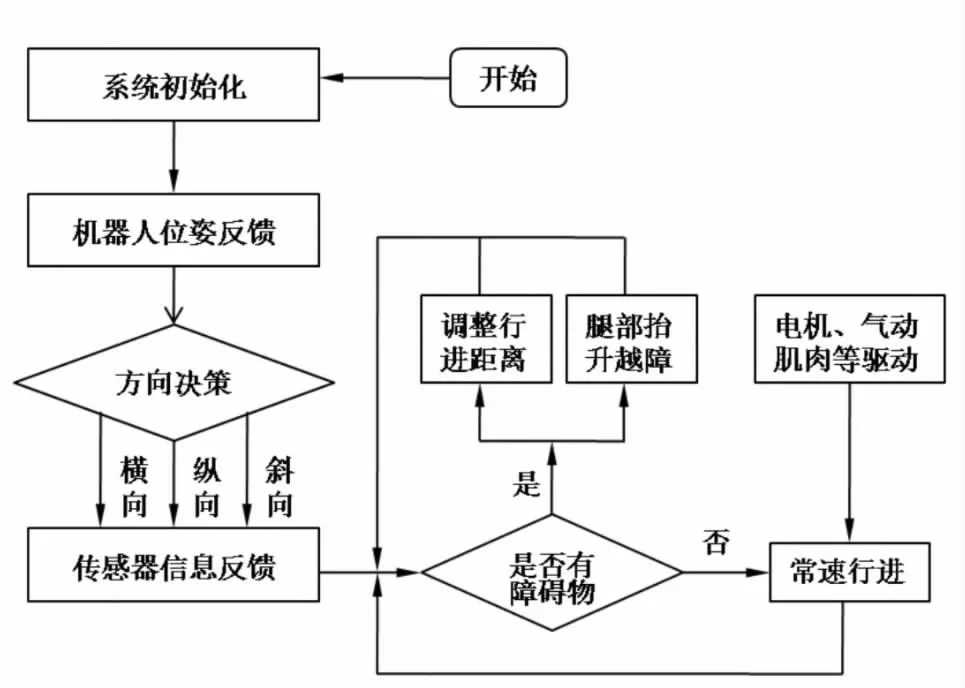
图1 系统工作流程图
4.2 新型爬壁机器人路径规划分析
4.2.1 测控系统分析
本次测控系统所选取的测控工具是超声波传感器。机器人自身以四边形架构为主,行程在200~300 mm 之间,测控距离为50~500 mm。利用距离传感器对机器人腿部到障碍物之间的距离进行检测,对距离信息与机器人的姿态进行对比,观察机器人是否做出跨越障碍的决策信息。利用高度传感器探测机器人在遇到障碍时,是否提前做出转弯避开障碍物的判定,从而考量是否需要在机器人内部,增加视觉障碍物识别系统[6]。
4.2.2 狭义路径规划分析
由于机器人工作是处于某一平面的,因此选取矩形栅格模型,进行机器人的路径规划。爬壁机器人的工作环境通常是玻璃或瓷砖的壁面,工作区域也是矩形。该测试环境探究爬壁机器人利用传感系统对障碍物的探测能力,从而对栅格环境模拟信息结果的传输。机器人在进行墙面清洗时,需要确保清洗到每一个地方,因此对其路径进行设定,需要利用遍历搜索法,使机器人按照起始坐标依次出发并进行访问,最终达到终点。图2 为机器人行径路线模拟图。
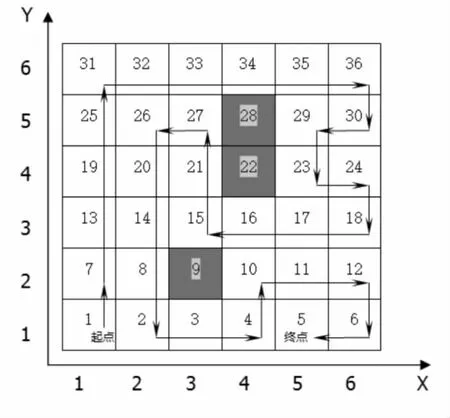
图2 机器人行径路线模拟图
综上所述,新型爬壁式机器人利用十字形架构,使内框架与外框架在移动过程当中形成相对位移,从而实现纵向、横向、斜向的移动,同时,在腿部肌肉收缩与拉伸方面进行了优化。并针对机器人自身驱动所带来的振动进行了探究,确保细微的振动不会影响机器人的正常运行。采取驱动控制系统与机械电气控制系统,共同完成爬壁机器人的总装。
猜你喜欢 壁面气动腿部 壁面函数在超声速湍流模拟中的应用航空学报(2022年9期)2022-10-14一种新的气动伺服弹性失稳模式的机理分析北京航空航天大学学报(2022年7期)2022-08-06二维有限长度柔性壁面上T-S波演化的数值研究北京航空航天大学学报(2022年7期)2022-08-06压力梯度对湍流边界层壁面脉动压力影响的数值模拟分析舰船科学技术(2022年11期)2022-07-15多留意腿部问题 随时舒缓腿部酸痛家用电器(2022年7期)2022-07-13非对称通道内亲疏水结构影响下的纳米气泡滑移效应表面技术(2022年2期)2022-03-03一种连翼飞行器气动和飞行力学迭代仿真方法北京航空航天大学学报(2021年4期)2021-11-24连续变弯度翼型动态气动特性数值模拟北京航空航天大学学报(2021年6期)2021-07-20基于NACA0030的波纹状翼型气动特性探索北京航空航天大学学报(2021年6期)2021-07-20快速瘦腿小妙招伴侣(2016年8期)2016-08-11